
自动驾驶的安全难题,“元宇宙”能解决了?
110亿英里——自动驾驶安全的必经之“路”
最近,智能汽车的安全问题被广泛讨论,如何保证智能及自动驾驶车辆的行驶安全性成为公众关注的热点,同时也是产业落地的关键点。早在2016年,兰德智库就指出,一套自动驾驶系统至少需要测试110亿英里,才能达到量产应用条件,主要考验的便是自动驾驶系统的安全性。
110亿英里,相当于环绕地球超44万圈,这是一个有生之年都难以完成的任务,必须加速这个验证过程。
「仿真测试」的出现满足了这一需求——通过数字模型简化替代真实世界,几何级提升自动驾驶系统测试效率。自动驾驶公司Waymo通过Robotexi一边载客一边收集路况信息,仅跑了0.1亿英里;而在仿真测试中,则已经跑完了150亿英里。如今,仿真测试已成为自动驾驶开发和落地的必经之路。
但这又带来了新的问题,在如此追求快速跑完测试里程数下,自动驾驶的安全性是否能得到保障?到底何种程度的仿真,才能让自动驾驶的安全性测试得到速率和质量的双提升呢?
在游戏「极品飞车」中,玩家可以虚拟身份,体验驾驶各类汽车,在城市道路纵横驰骋的快感。这样高度仿真的游戏,正是如今处于风口上的“元宇宙”(Metaverse)概念。

《极品飞车》游戏场景 | 网络
如果有一天,玩家进入游戏,发现行驶的道路场景无比熟悉,就是自己所在城市道路的1:1复刻,并且拥有逼真的道路事件。将这种现实世界全真数字仿生的“元宇宙”,应用到自动驾驶车辆的仿真测试中,是否能在加速自动驾驶落地进程的同时,进一步提升其安全性?
“数字孪生”的仿真测试平台:自动驾驶车辆加速驶入真实世界
仿真测试分为L1-L5五个仿真层次,随着级别的升高,其中包含的车辆系统真实元素就越多;而在驾驶环境方面,在真实路测之前,数字世界对真实世界的孪生度越高,对自动驾驶系统的测试和数据反馈就越是精准,对于OEM或Tier 1有针对性的设计产品、改进产品帮助越大。
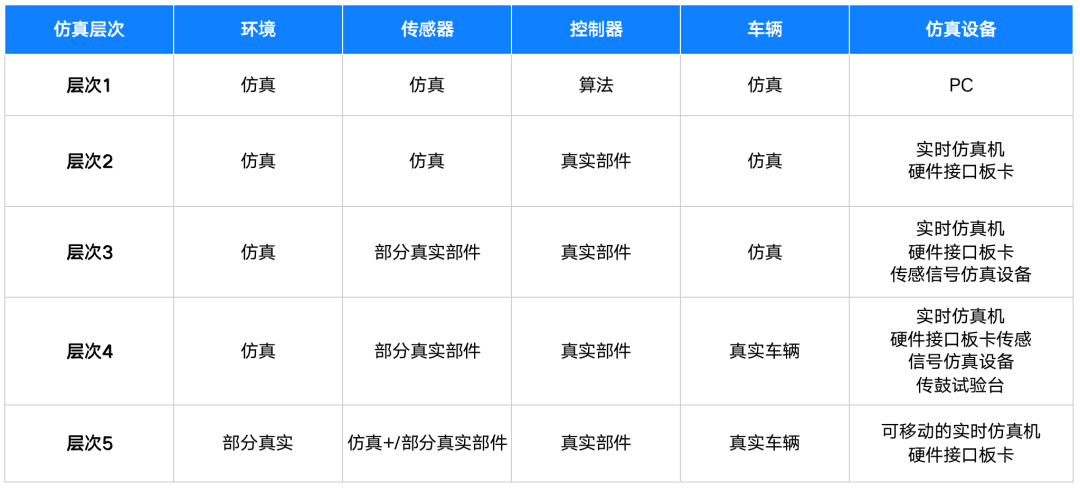
仿真测试的不同层次 | 文字:知乎@孙工;图片重制:时空专栏
在路端,高精度地图作为高级别自动驾驶的基础设施,是一个很好的世界框架:精度到厘米级的道路数据,道路细分到车道级,并涵盖了车道周边的交通标志、信号灯等信息,实现了道路交通真实空间的1:1完整复刻和数字孪生。
在车端,智能驾驶系统的测试主要包含了感知、决策、执行部分。对执行部分的基础测试,需与汽车的各执行系统连接,如线控底盘、转向、制动系统等。
通过感知、定位等信息技术,在高精度地图中动态运行自动驾驶车辆,构建场景仿真和车辆动力学软件的运行环境,能够让汽车磨合、配适各种不同的道路环境,测试其动力、转向、制动系统对道路曲率、坡度等的反应,以及传感器对车道、交通灯、交通信号等的实时侦测能力;同时基于激光雷达、毫米波雷达等不同传感器的特性,发送带误差或原始样例数据。产品设计和开发人员基于产生的高度仿真结果,评估算法或系统的安全性。
基于高精度地图的自动驾驶仿真测试 | 网络
在这个过程中,自动驾驶车辆对数字孪生世界的反馈将被记录并形成测试闭环和迭代基础,有效克服了传统封闭场地测试与真实道路环境的脱离,在测试启动阶段便让自动驾驶车辆驶入“真实世界”,对于设计产品、改进产品具有长远的效率意义:
数据表明,在汽车电控系统的开发过程中,越早发现问题则修正问题的成本越低。高精度地图构建了数字孪生级的仿真驾驶环境测试车辆,在早期便能得到精准测试反馈,有效降低开发成本,提高效率。
在特殊驾驶场景下,如高速公路、高架,通过现实运行和验证的高精度数字底座构建的自动驾驶仿真测试平台,能够有效测试各种类型的自动驾驶车辆在不同道路结构和交通规则下的行驶能力。
在快速变化的用户需求和技术升级带来的全新测试需求下,数字孪生级的仿真测试平台能够游刃有余地应对各种动态需求,而无需为某个特定需求而增加开发测试场景。
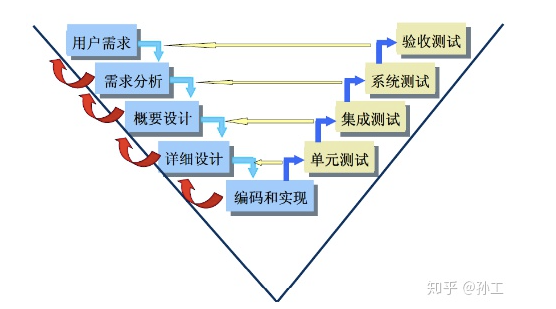
在自动驾驶测试中广泛应用的V模型流程 | 知乎@孙工
这样的道路基础仿真为自动驾驶系统打造了一个高精细的数字底座,但还无法满足自动驾驶系统应对海量的道路动态变量的可靠度测试需求,我们需要进一步将道路事件与动态环境嵌入高精度空间框架,构建自动驾驶的“元宇宙”。
自动驾驶“元宇宙”:随机耦合海量道路事件的混合模拟时空
真实世界永远高于预测,而人类能做的便是不断模拟各种情况的试错,以降低不确定性。交通与道路世界也是如此。
道路变量是概率事件,海量、复杂的测试场景无法在真实路测中一一复现,所以,不断重复常规测试场景和长时间路测并不能全面覆盖性测试自动驾驶算法。真实世界的道路状况是由海量要素耦合而成,要消除这样的“不确定性”,必须构建一个庞大的事件数据库,让算法获得充分测试,锤炼成一个“老司机”。
在数字孪生的基础上,对道路事件和环境进行时空动态仿真,通过车端的实时动态交互(V2X),考验自动驾驶系统从环境感知到决策控制的协作和联动能力,这也是当下仿真测试最为关注的关键环节和难点所在。
这就需要在空间框架基础上,构建一个完整的自动驾驶测试「元宇宙」:对影响驾驶安全的气象条件、周边车辆、交通环境等各种概率的道路事件的随机组合模拟,并与数字孪生的高精度空间框架相融合,形成聚合和极限道路测试,可以无限接近和覆盖现实交通世界中的事件概率,有效考验算法的完整性和弹性,并通过并行仿真测试大幅缩短测试时间。
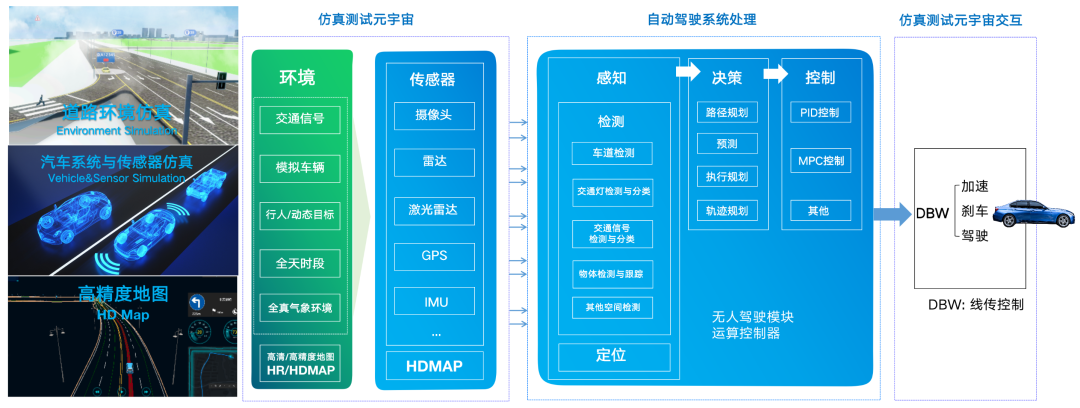
自动驾驶仿真测试元宇宙架构与原理 | 时空专栏
怎样具象化地理解这个「元宇宙」呢?
就像我们在玩极品飞车时,玩家可以选择风格完全不同的城市道路或者山间公路以不断增加游戏难度和新鲜度,在自动驾驶的“元宇宙”中也是如此原理,测试人员可在孪生空间上模拟运行或运用真实气象数据复现雾霾雨雪沙尘烟等气象环境,以及强光等其他低能见度单元,以增加驾驶难度和新测试样例,并通过与城市道路、高速、高架等不同的驾驶环境交互,模拟多重现实场景可能性。




同一道路场景下的不同道路环境模拟 | CARLA
在这其中,道路事件在数字孪生环境中的高仿真还原也是一大挑战,其数据来源于真实世界,也将极大地提升测试可靠性。例如,影响驾驶的一大因素:气象状况,其千变万化,程度各有不同,同样的降雨或雾,也会因为现实情况或类型不同而导致道路能见度、行驶决策有较大差异。
通过高精度空间数字底座在智慧交通中运行过程中积累的路网监测数据,清洗、整合并选择典型场景,基于此混合生成新样例,并将这些零散而独立的道路事件连贯地模拟运行于高精度数字底座之上,构建出真实世界映射的动态时空,形成高保真的混合虚拟现实道路场景,相比传统和自行模拟的测试场景,这种模式能够精准测试自动驾驶系统应对各类实际道路事件的实时环境感知力,以及关联决策控制的快速协同能力。
接下来,就是在这样多样化天气环境下随机模拟实时动态目标,例如雨雪天穿越马路的行人或动物,高速公路上突然换道或并线的同行车辆,或者环境感知被遮挡情况下出现的障碍物等,这一切都是为了创造一个具有广阔包容性的混合测试场景的模拟时空,形成车辆从感知到决策,再到执行的完整驾驶能力的测试闭环。

模拟雨后路面环境,自动驾驶车辆与摩托车同时穿越交通路口 | Unreal
然而,这个「元宇宙」并非完全为机器测试与学习而构建。
目前,无论是ADAS还是路测环境中的自动驾驶,乘客的驾乘体验和安全性依然无法超越人类驾驶员。
然而,一份 “2022-2042 年自动驾驶汽车、机器人轴和传感器” 的全新报告则指出,自动驾驶汽车的原生优势必然超越人类:(自动驾驶汽车)不会被可能影响人类的事情分散注意力,例如其他司机或手机,5G网络连接将确保自动驾驶车辆收到比人类所能处理的更多关于其周围环境的实时信息,自动驾驶汽车将匹敌或超过人类安全。
现实与终极目标的矛盾意味着,在仿真测试中,依靠单一机器测试还不足以让自动驾驶的安全性快速超越人类驾驶,这个过程依然需要人类作为经验体参与其中,对其进行助推加速。
「元宇宙」中高还原度的光照渲染和游戏级的VR视觉交互,能够让人类直观而形象地体验自动驾驶测试场景,并通过操作数据表达更加灵活而人性化解决方案,进而形成更为积极的反馈数据链闭环系统,推动人性化自动驾驶的开发和落地。

模拟驾驶舱 | 网络
渗透并影响现实的自动驾驶「元宇宙」
元宇宙脱胎于游戏理念,但也能在数字空间中高仿真重建物理世界,在现实虚拟的互相演进中推动现实世界发展;元宇宙也并非单一宇宙,而是“多元宇宙” —— 基于不同的业务场景构建的全真数字空间,将成为下一代数字化转型趋势,对各个行业产生指数级的积极影响。无论在大众语义和概念中如何理解,立体、仿真、动态的数字时空已经在产业实现雏形化应用,并在进一步与业务融合的过程中,逐渐显示出其优越性。
这其中,自动驾驶仿真测试就是一个典型代表。「元宇宙」模拟了一个虚实结合的动态世界,并在这个世界与真实道路世界之间提供了一个交互接口,数以万计的自动驾驶车辆可通过这个接口并行测试,应对海量测试样例场景以逼近真实世界概率,促进了安全性与测试效率之间的良性循环,或将成为产业发展历程中的一座重要的里程碑,其与广泛融合后的产业发展效应,也值得我们期待。