
媒体活动
2022.08.08
陆洪彬首席执行官:一边保地图“鲜度”,一边赋道路“智慧”
据记载,目前可追溯到的、最古老的地图由公元前27世纪苏美尔人所绘制,这代表着原始社会时期的人们在从事渔猎、采掘等最基础的生产活动中就已经有了对地图的需要。虽然这些地图上标画出的地物种类并不丰富,但却实实在在地起着确定位置、辨识方向的作用。
从早期用柳条、贝壳等物刻画在瓦片上的简易地图,到现在用数据、算法构建在云端的高精度地图,地图始终在人类的社会生产活动中占据重要地位,地图的样貌也能够反映出当前社会的发展状况。说到21世纪最“招风”的地图,非高精度地图莫属。
随着人工智能热潮的越发汹涌,自动驾驶技术这个出现于20世纪的概念,终于在科技发达的背景和需求强烈的市场助推下破茧而生。高精度地图也随之迎来快速发展期,不管是传统地图供应商,还是新兴地图制造商,各家都摩拳擦掌地想在高精度地图市场中占据一席之地。
作为国内的老牌图商,易图通在全球知名咨询机构IDC近期发布的《“2020高精度地图解决方案市场份额”研究报告》中排名第三。在台前光鲜的背后,这家国内的高精度地图图商也有着自己的故事。
国内对导航电子地图领域的涉足较晚,2010年,易图通得到了阿里巴巴的战略投资,这个背景同时吸引来一位技术过硬、目光长远的外企人才,他就是陆洪彬。陆洪彬曾工作于中国航天工业系统,从事系统仿真工程及自动控制系统设计,曾在多个不同背景的公司就职,其中包括世界头部地图厂商NAVTEQ(后更名为HERE),并作为该企业中国大区的第一名员工开创了公司的中国业务。
 易图通科技(北京)有限公司首席执行官陆洪彬
易图通科技(北京)有限公司首席执行官陆洪彬
2015年起,陆洪彬担任易图通首席执行官,其深厚的工程背景、广阔的国际视野让易图通在国内图商界迅速站稳了脚跟。2016年,易图通位跃国内三大图商之列,随后,易图通积极转型新赛道,于2022年初向福特数款量产车型提供了高级辅助驾驶的地图服务,与国内外众多的著名企业建立了生态合作,成功实现了从传统导航电子地图生产到高精度地图服务的转型升级。
那么,高精度地图与传统导航地图的区别是什么?自动驾驶和高精度地图之间有怎样的联系?高精度地图在走向市场化的过程中又遇到了哪些阻碍?今天,《中国测绘》特邀易图通科技(北京)有限公司首席执行官陆洪彬接受采访,与众读者一同探讨这些问题。
从二维到三维 从人脑读取到机器检索
当外行人第一次见到“高精度地图”的时候,也许只会把它解读为数据精度更高的地图。“高精度地图不止是提高数据精度这么简单,在维度、面向群体和使用场景等方面都和传统的导航电子地图有很大的区别。”陆洪彬说道。
导航电子地图出现于1992年,这种辅助驾驶地图能够通过直观、二维的地理实景模拟表现方式为用户提供地图查询、出行导航等辅助驾驶功能。经过近30年的科技发展及技术迭代,尽管精度一再提高,但传统导航电子地图的产出物始终是二维的、以行驶路径为主的平面产品。不管导航电子地图收集了多少信息,能为驾驶者提供多少种不同的路线方案,最终还是离不开驾驶者本人。
在高精度地图的应用场景中,自动驾驶技术可以解放驾驶者时刻放在方向盘上的双手,而高集成度、高度完善的人工智能算法与高实时性、高可靠性的高精度地图的紧密结合是实现自动驾驶场景的重要基础。
与传统导航地图相比,高精度地图不仅有更高的数据精度,还有更强的数据整合能力。传统导航地图的精度仅达10米级,而高精度地图的精度则可达分米级。通过收集更多的道路周边信息,其在提高精度的同时实现了从二维数据到三维数据的维度跨越。动态高精度地图所需要整合的信息量是传统导航电子地图的数倍乃至更多,不仅仅是收集所行驶路段的信号灯信息、车流量信息等。如果说导航电子地图能够为驾驶者提供一条既定的车辆行动路径,那高精度地图能够提供的就是一张动态实时更新的精密地物信息网络,拥有所谓的“上帝之眼”。
当高精度地图能够同时保证高精度和高鲜度时,就能与人工智能算法一同开创自动驾驶新纪元,降低车辆安全事故的发生频率,保障使用者的生命财产安全,创造全新的、极佳的出行体验。
对于地图供应商们来说,自动驾驶无疑是一块巨大的蛋糕,各大科技巨头纷纷入局,但始终见效甚微。
自动驾驶可以分为六个等级,分别是:无自动化L0,驾驶支持L1,部分自动化L2,条件自动化L3,高度自动化L4,完全自动化L5。
业内认为,只有L4以上才可以称为自动驾驶,L4以下均为辅助驾驶。等级越高,所需要的高精度地图内容和属性就越丰富。特斯拉汽车曾在2021年向全世界宣布“我觉得我们已经非常接近L5级自动驾驶了。我有信心,我们将在今年完成开发L5级别的基本功能。”。但在几次安全事故出现后,特斯拉汽车也开始变得谨言慎行。
自动驾驶技术为何迟迟无法突破技术瓶颈?高精度地图又能怎样助力其发展?陆洪彬一语道破这个困境:“根本问题是地图的鲜度不够,我们要想办法获得更多信息的实时反馈。”
用众包建图保持数据“鲜度” 用车路协同赋予道路“智慧”
“其实特斯拉的自动驾驶功能是纯粹依靠人工智能的眼睛,也就是汽车摄像头,还算不上是真正L4级别的自动驾驶,依旧属于辅助驾驶范畴。”受限于更为复杂的路况,陆洪彬认为,想在国内让自动驾驶的等级达到L4,就必须让高精度地图拥有高实时性,增加车与车、车与路之间的反馈,走多传感器融合的技术路线。而高精度地图无疑是这条技术路线的重要起笔,于是,实现地图的高鲜度、高精度、高可靠性成为图商们的共同目标。
目前,激光雷达扫描技术已经在高精度地图制作领域大量投入,该技术能够满足地图对高精度的需求,但激光设备的作业成本十分高昂,无法满足地图对“鲜度”的需求。“其实扫描一次的费用并不高,但如果要保证地图的鲜度,就需要持续不停地对道路进行扫描,这个作业成本是任何一家企业都无法承受的。”
 车路协同:昌九效果图新版
车路协同:昌九效果图新版
此外,激光制图流程目前还需较多的人工介入,在参与海量数据处理时会不可避免地出现误差,影响地图的可靠性。陆洪彬认为,易图通已经找到了击碎这一困境的解决办法——众包建图。
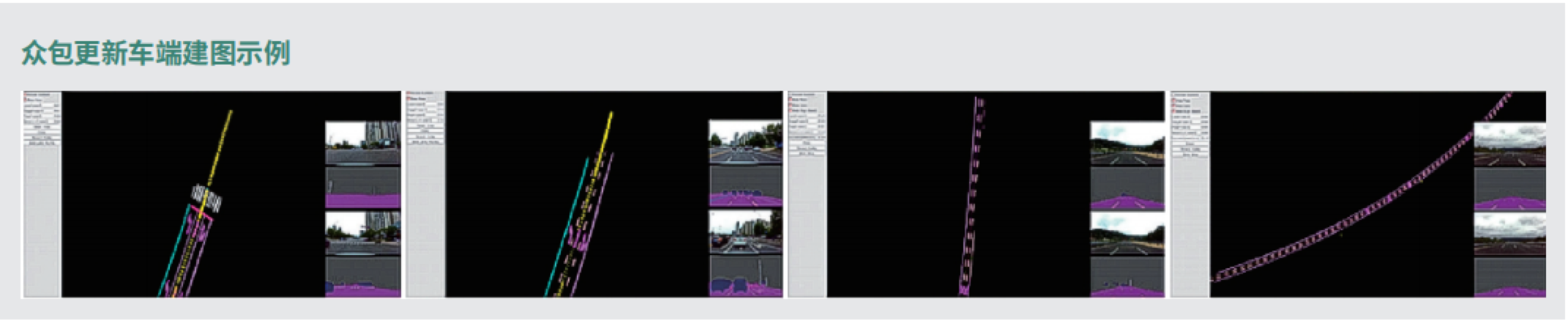
众包建图,即采用量产车的车载传感器,包括摄像头、普通GNSS、车规IMU以及CAN信息实时提取路面的高精度地图要素,并将矢量信息上传到云端进行差异检测、数据聚合、精度优化等自动化处理,更新已变化的高精度地图,再将地图及时回传车端,实现地图闭环。众包采集车的设备精度虽比不上专业采集车的设备,但可以以量取胜,只要累积足够数量的、实时行驶的汽车数据,就能获取到高实时性的道路信息,持续保证云端数据的“鲜度”。
 高精度地图服务众包
高精度地图服务众包
目前,易图通采取“双翼”高精度地图策略,一翼依靠激光雷达制作一张底图,另一翼开发视觉众包更新与建图,两种模式相互校验,将高精地图的可靠性提升两个数量级以上,领先业内。
陆洪彬坦言,“当下的众包更新与建图还是有部分人工参与,随着未来技术的发展,人为干涉会越来越少,甚至将完全不需要人工参与,实现一体化自动建图,这将极大地提升数据的可靠性,从而助力更高级别的自动驾驶早日实现,这是易图通为之不懈奋斗的目标,也是作为一个行业老兵的最大心愿。”
陆洪彬说,在高精度地图领域追求卓越的同时,易图通也在积极尝试增加自动驾驶系统中数据反馈的方法。“国内的路况信息要比其他国家复杂很多,所以我们不仅需要智慧的车,还需要智慧的路。只有这两者搭配使用,才能得到一个智慧的自动驾驶场景。”国内有更多的出行人口、更密集的行驶车辆及种类更繁杂的道路设施,复杂的路况信息让国内的自动驾驶场景不能仅靠单车智能,“车路协同”这一概念便应运而生。
“车辆协同”,即采用先进的无线通信和新一代互联网等技术,全方位实施车车、车路动态实时信息交互,并在全时空动态交通信息采集与融合的基础上开展车辆主动安全控制和道路协同管理,充分实现人车路的有效协同,保证交通安全,从而形成安全、高效和环保的道路交通系统,这也是易图通重点关注的领域。在行业大部分企业还在思考如何在车辆上挂载更多传感器时,易图通已经开始尝试利用道路上的传感器,实现车路协同的功能。
目前,易图通已经参与多个车路协同的项目,如某省正在试点的北斗自由流收费项目。当前,多数道路收费站依旧采用人工及ETC相结合的收费方式。但通过北斗高精度定位、道路高精度地图、车端设备(OBU)及路侧传感器(RSU)的融合协同作用,就可以把通行信息、道路状况、行驶状态等反馈到云端数据处理中心,直接实现车辆自由流通行和费用无感支付,提升通行效率和出行体验。
除此之外,易图通还参与了江西省新一代国家交通控制网和智慧高速示范工程,与运营商合作参与了多个城市的双智(智慧城市基础设施及智能网联汽车协同发展)项目建设。
随着国家“十四五”规划明确提出建设数字中国的目标,国内各大城市也纷纷明确了城市数字化转型的顶层规划。智慧城市的智能基础设施成为智能网联汽车发展的“数字底座”,智能网联汽车则成为智慧城市发展的切入点。如何将两者有机结合,相互促进,协同发展,成为智慧城市建设的新思考。“行业会随着社会的发展变化,想要保持领先优势,就不能等别人超过你的时候才想起改变。”从易图通近些年的项目成果来看,易图通已经找到了适合自己的路。
未来,易图通将坚持自动驾驶和车路协同“双轮驱动”战略,致力于打通车端和路侧的数据,满足自动驾驶领域的需求,实现数据闭环。高精度地图的应用场景并不局限于自动驾驶,易图通也将通过对高精地图生产线的改造,满足智慧交通、数字孪生城市等领域的需求,立足当下,放眼未来。